ROS(6):ROS安装rviz模拟器
本文共 611 字,大约阅读时间需要 2 分钟。
本文的原文连接是: 未经博主允许不得转载。
博主地址是:1,关于rviz模拟器
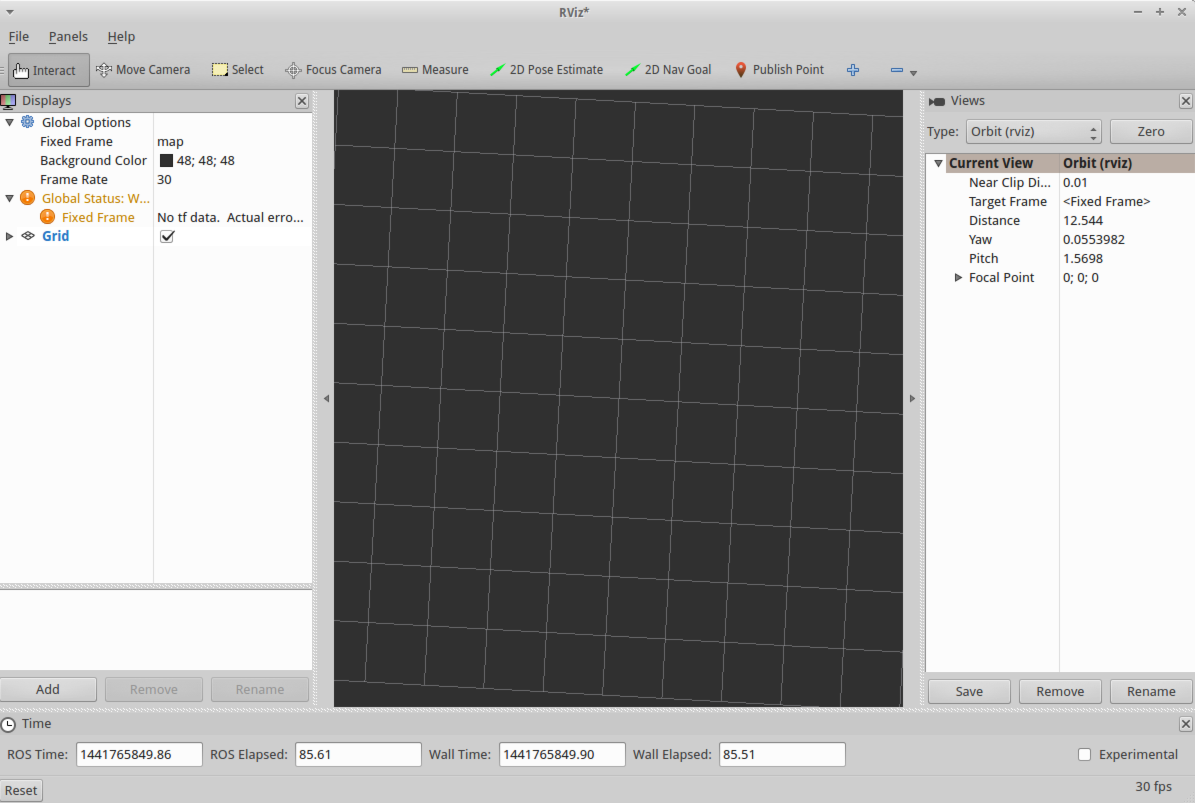
rviz是ROS中一款强大的3D可视化工具。
网站:2,安装&启动
之前必须安装ros
参考之前写的博客:rosdep install rviz#执行初始化sudo rosdep init#更新rosdep update
然后启动会遇到一个问题:
libGL error: core dri or dri2 extension not foundlibGL error: failed to load driver: vboxvideo[ INFO] [1441765508.993507731]: Stereo is NOT SUPPORTED[ INFO] [1441765508.995292221]: OpenGl version: 2.1 (GLSL 1.2).Segmentation fault (core dumped)
需要设置下环境变量
#设置变量export LIBGL_ALWAYS_SOFTWARE=1#启动即可rosrun rviz rviz
更多rviz启动问题,参考:
3,使用
参考文档:
里面写的非常详细了。这里就不摘抄了。4,总结
本文的原文连接是: 未经博主允许不得转载。
博主地址是:rviz是个3D模拟器,可以解决没有机器人设备无法调试的问题。
但是虚拟机里面好像运行慢,正在找解决办法。
你可能感兴趣的文章
以太网帧中的PPPOE报文格式
查看>>
RHEL 5服务篇—Linux下部署DHCP及中继
查看>>
linux上的 heartbeat 双机热备服务架设
查看>>
Spread for Windows Forms快速入门(2)---设置Spread表单
查看>>
关于Close和FormClosed FormClosing
查看>>
[译]Innodb 性能优化基础
查看>>
基于centos4.4的mg手工下载RPM包安装顺序记录
查看>>
Device Mutipath参数设置
查看>>
常用的JavaScript验证正则表达式
查看>>
系统架构师-基础到企业应用架构-系统建模[上篇]
查看>>
杯具的vmware和virtual box虚拟机转换
查看>>
Linux Netbeans汉化不全
查看>>
《学习opencv》笔记——矩阵和图像操作——cvSetIdentity,cvSolve,cvSplit,cvSub,cvSubS and cvSubRS...
查看>>
DDR3基本知识及测试【转】
查看>>
Code First开发系列之领域建模和管理实体关系
查看>>
从中国男足看项目管理
查看>>
局域网Internet的共享
查看>>
MapGuide Fusion viewer中如何用Google Map/Yahoo Map/Bing Map做底图
查看>>
SharePoint 2016 的新特性概览(二)(What's New for IT Professionals in SharePoint Server 2016)...
查看>>
【转】IOS中的release和nil
查看>>